Multirobot systems for EMF
monitoring
Environmental
monitoring requires distributed systems able to detect
phenomena reliably and to produce detailed environmental
assessments. The use of robotic sensor networks in which
nodes are mobile robots carrying sensors around the
environment represents a valuable solution.
In
this research we developed a multirobot system that
localizes and characterizes low-frequency Electro-Magnetic
Field (EMF) sources. The monitoring of these EMF phenomena
is extremely important in practice, especially to guarantee
the safety of people living and working in places with power
lines, motors, and other equipments. It is thus important to
localize and characterize the EMF sources in an environment
to assure that the EMF levels are compliant with the current
legislation.
Our
multirobot system is hierarchical. A coordinator (a
computer) supervises the activities of the system, while a
number of explorers (mobile robots equipped with
EMF sensors) navigate in the environment and perform
measurement tasks. Our multirobot system uses a global centralized
approach to deploy the perceptive robots in the environment:
the explorers move in the positions that the coordinator
globally evaluates as interesting. This
contrasts with usual approaches that use a local
criterion to decide the spatial configuration of the
nodes: each node adjusts its position according to those of
its neighbors, for example using optimization algorithms
based on potential fields.
This
research has been part of the APE Project funded by the MIUR
(
People involved
Francesco
Amigoni
Vincenzo Caglioti
Giulio Fontana
Some
experiments
Localizing
a static simulated EMF source with two robots: https://amigoni.faculty.polimi.it//EMFMOROAgency/te.mpg
Localizing a moving simulated EMF source with one robot:
https://amigoni.faculty.polimi.it//EMFMOROAgency/oems.mpg
Localizing a moving simulated EMF source with two
robots: https://amigoni.faculty.polimi.it//EMFMOROAgency/tems.mpg
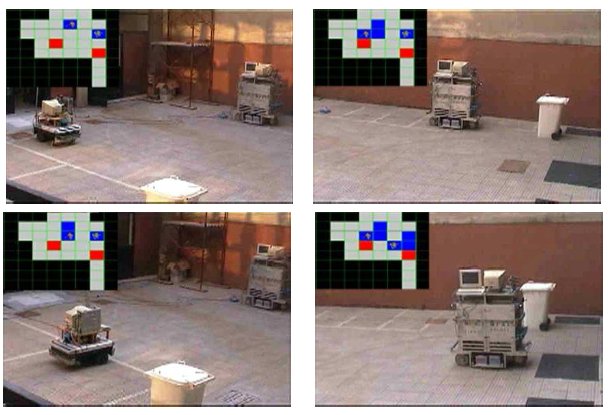
Localizing a static real EMF source with one robot: https://amigoni.faculty.polimi.it//EMFMOROAgency/oer.wmv
Localizing a static real EMF source with two robots: https://amigoni.faculty.polimi.it//EMFMOROAgency/ter.wmv
Some relevant publications
- Amigoni, F.; Brandolini,
A.; D'Antona, G.;
Ottoboni, R.; Somalvico,
M. (2003). Artificial
Intelligence in Science of Measurements: From
Measurement Instruments to Perceptive Agencies. IEEE
Transactions on Instrumentation and Measurements,
IEEE Press, 52(3), June 2003, p. 716-723.
- Amigoni, F.; Caglioti,
V.; Fontana, G. (2004). A
Perceptive Multirobot System for Monitoring
Electro-Magnetic Fields. Proceedings of the
"IEEE International Conference on Virtual Environments,
Human-Computer Interfaces, and Measurement Systems
(VECIMS2004)", IEEE Press,
- Amigoni, F.; Caglioti,
V.; Cadonici, S.; Fontana, G.
(2005). Experimenting
with a Robotic System for Localizing Magnetic Field
Sources. Proceedings of the "IEEE International Conference on
Virtual Environments, Human-Computer Interfaces and
Measurement Systems (VECIMS2005)", IEEE Press,
- Amigoni, F.; Brandolini,
A.; Caglioti, V.; Di Lecce,
V.; Guerriero, A.; Lazzaroni, M.; Lombardi, F.; Ottoboni,
R.; Pasero, E.; Piuri,
V.; Scotti, O.; Somenzi, D.
(2006). Agencies
for Perception in Environmental Monitoring. IEEE
Transactions on Instrumentation and Measurements,
IEEE Press, 55(4), August 2006, p. 1038-1050.
- Amigoni, F.; Fontana, G.; Mazzuca,
S. (2007). Robotic
Sensor Networks: An Application to Monitoring
Electro-Magnetic Fields. In Maglogiannis,